A research group led by Prof. Kang Rongjie, an Associate Professor from the Centre for Advanced Mechanisms and Robotics of Tianjin University, developed a novel continuum bio-inspired robot that looks like a flexible arm combining softness and strength. This invention will be a “catcher” in space to handle failed satellites and space debris if it passes the undergoing ground tests. Under the title of “Geometric constraint-based modeling and analysis of a novel continuum robot with shape memory alloy initiated variable stiffness”, the research result was published in a prestigious international journal —The International Journal of Robotics Research.
Inspired by biological tentacles or snakes, soft continuum robots possess theoretically infinite degrees of freedom (DOFs), intrinsic compliance, and splendid adaptability. They can avoid obstacles and explore unknown environment without the assistance of complex sensors, thus extending the capabilities of traditional rigid robots that only work within specified space.
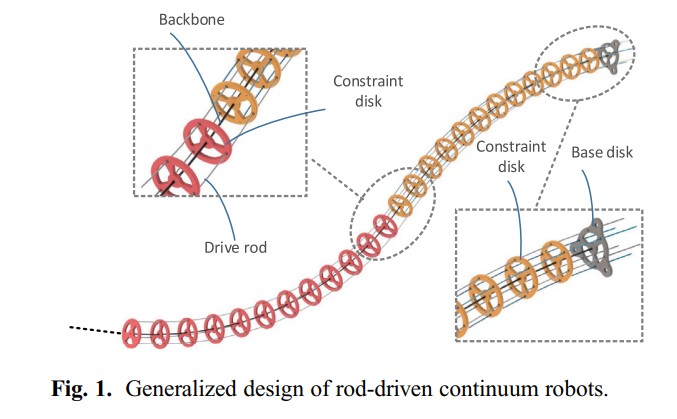
The newly developed novel continuum robot by Kang’s research group is composed of a central backbone made of hyper elastic NiTi alloy and constraint disks made by 3D Printing. The drive rods evenly distributed around the constraint disks can actively control the prototype to curve or passively deform with changing environments. When it comes to blind spots, the robot can observe the object through a camera installed at its end, steer clear of the obstacle and catch the target.
To enhance the load capacity of the flexible arm, the research group also designed a variable stiffness mechanism powered by a set of embedded Shape Memory Alloy (SMA) springs. When the robot arrives at the predetermined operating position, the drive rods and constraint disks can be locked relatively, so that the robot’s stiffness can be tripled at most, achieving the conversion from softness to stiffness.
Additionally, Kang’s research group initiated a geometric constraint-based modeling theory to calculate the large-scale deformation of the high-redundancy flexible manipulator, which enables the coupling control of both strength and position and reveals the multiple bending mechanism of continuum robot that traditional models can’t explain. This modeling theory may be applied in structure optimization and control algorithm development for the robot.
Prof. Dai Jiansheng, one of the co-authors of the research paper, who is an IEEE and ASME fellow, the Editor-In-Chief (EiC) of an international prestigious robotics journal Robotica, and the winner of the Machine Design Award issued by ASME, said that this research result could also be applied to disaster rescue, aero-engine maintenance and so on.
By Zhang Zhuoran
Editor: Eva Yin









